

最佳的视场 (FOV) 适用于机器人手臂式的中型和大型料箱
用于超高精度点云,超越工业2D相机图像质量以进行分割。
通过最先进的3D校准,实现精确可靠的拣选和放置。
Zivid 2+ LR110是一款多功能高质量的3D相机,适用于大视场和工作范围的复杂机器人自动化应用,能够全面覆盖每个角落。适合机器人手臂式安装和固定安装两种方式。
Zivid 2+ LR110凭借其大视场和同时观察两个货箱的能力脱颖而出。它可以进行物体分割、获取位置、检查碰撞并规划下一个放置动作。
这使得Zivid 2+ LR110成为一种具有成本效益和高效的解决方案,简化了操作,减少了对额外传感器的需求。尽管大视场通常会带来一些妥协,但它依然能提供快速且卓越的点云数据,适用于密集的分拣和包装任务。


通过快速的捕获时间和优化的大视场,在近距离内实现了大工作范围的高通量。机器人手臂式安装的Zivid 2+ LR110非常适合进行汽车零件的拣选,最大限度地减少运动和周期时间的损失。其坚固的设计、低遮挡、以及卓越的反射处理和点云伪影处理能力确保了其卓越的性能。
机器人手臂式安装的Zivid 2+ LR110解决方案在混合物品的卸垛(包括透明物体如水瓶)中表现出色。您只需要一台相机就能覆盖多个托盘,从而降低成本和复杂性。相机的近距离确保了卓越的2D图像和点云,带来可靠一致的拣选效果。凭借其快速的捕获时间,Zivid 2+ LR110使高速机器人上下料成为可能。

| 工作距离 |
|
70-170 cm (max) |
| 空间分辨率 |
|
440 µm at 110 cm |
| 视野范围 |
| 109 x 85 cm² |
|
at 110 cm |
| 最佳适用 |
|
机器人手臂式安装 M / L working volume |
| 关键应用场景 |
| 货品分拣 |
| 无序抓取 |
| 上下料 |
Zivid 2+ LR110 在机器人手臂式安装方面进行了优化,提供了大范围的扫描体积,能够在一次拍摄中呈现密集且准确的 3D 点云,揭示托盘、大型料箱,甚至多个货物箱。
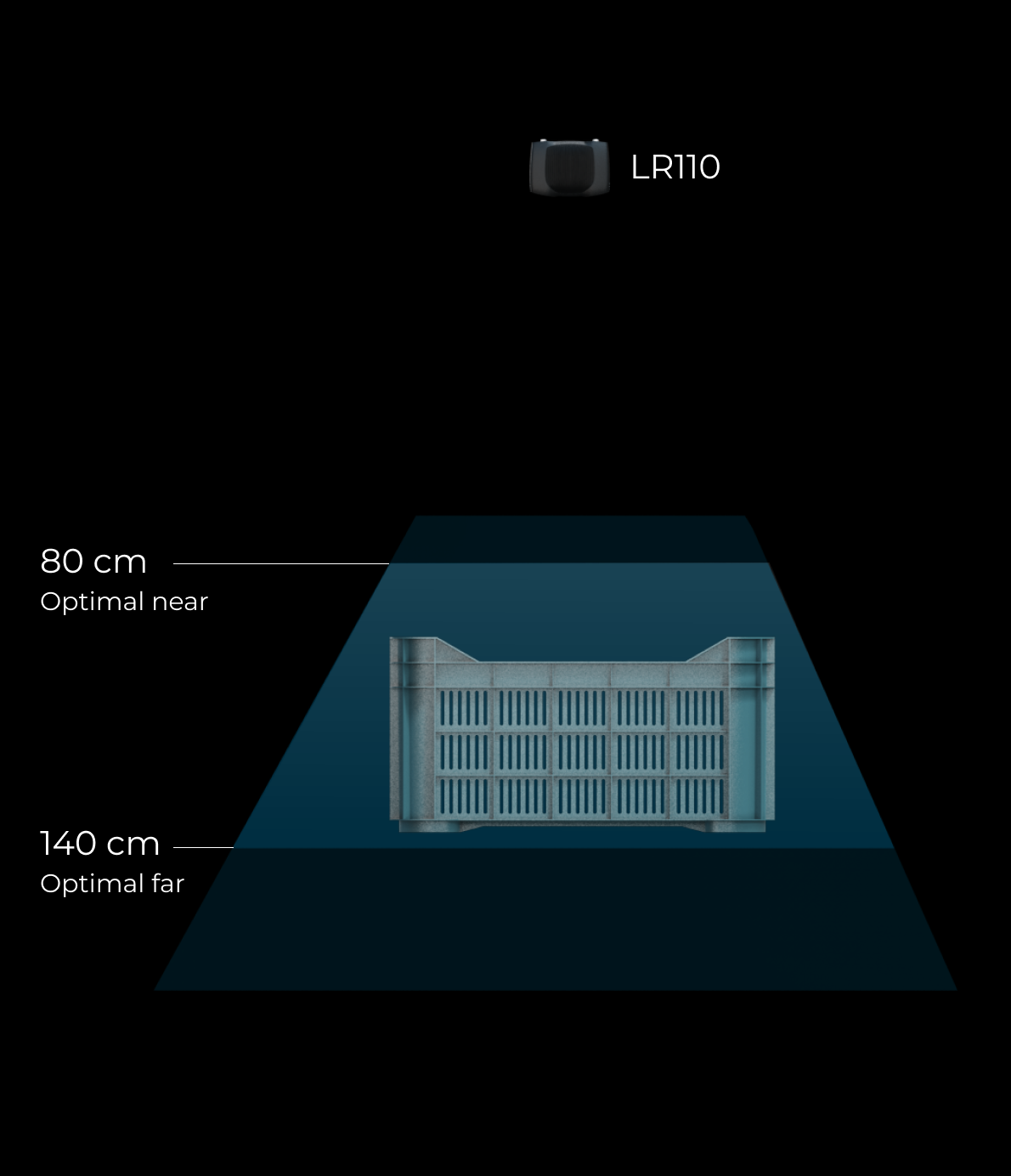
110 cm的焦距经过精心选择,以匹配长型夹持器和末端执行器所需的间隙,从而确保无序抓取和上下料任务的精准与高效。


Zivid brings
Gjerdrums
N-0484, Oslo
Norway
.svg "Zivid")






